こんにちは
MVEにビルドして、scene2psetのポイントクラウドをシーン座標系に変換する簡単な方法はありますか。
デプスマップ再構成アルゴリズムを開発しており、これらのマップをMVEにフィードしてポイントクラウドを作成しています。再構成が正常であるかどうかをテストするためにdinoデータセットを使用しましたが、シーン座標ではありません。 Scene2psetでバウンディングボックスargを使用すると、空のplyファイルが取得されます。 それ以外の場合は、ポイントを取得します。これは、クラウドがシーン座標にないことを意味します。これを修正するにはどうすればよいですか。
注:dmreconを使用した場合でも、同じことが起こります
ありがとうございます
 HelliceSaouli
HelliceSaouli
全てのコメント12件
scene2psetアプリは、シーン座標系で点群をエクスポートします。 変換は適用されません。 [シーンインスペクト]タブのUMVEにポイントクラウドとシーンをロードすることで確認できます。
 simonfuhrmann
2017年10月27日
simonfuhrmann
2017年10月27日
いいえ、そうは思いません。 現在、UMVEが組み込まれていません。後で確認します。 しかし、これはscene2pset出力です。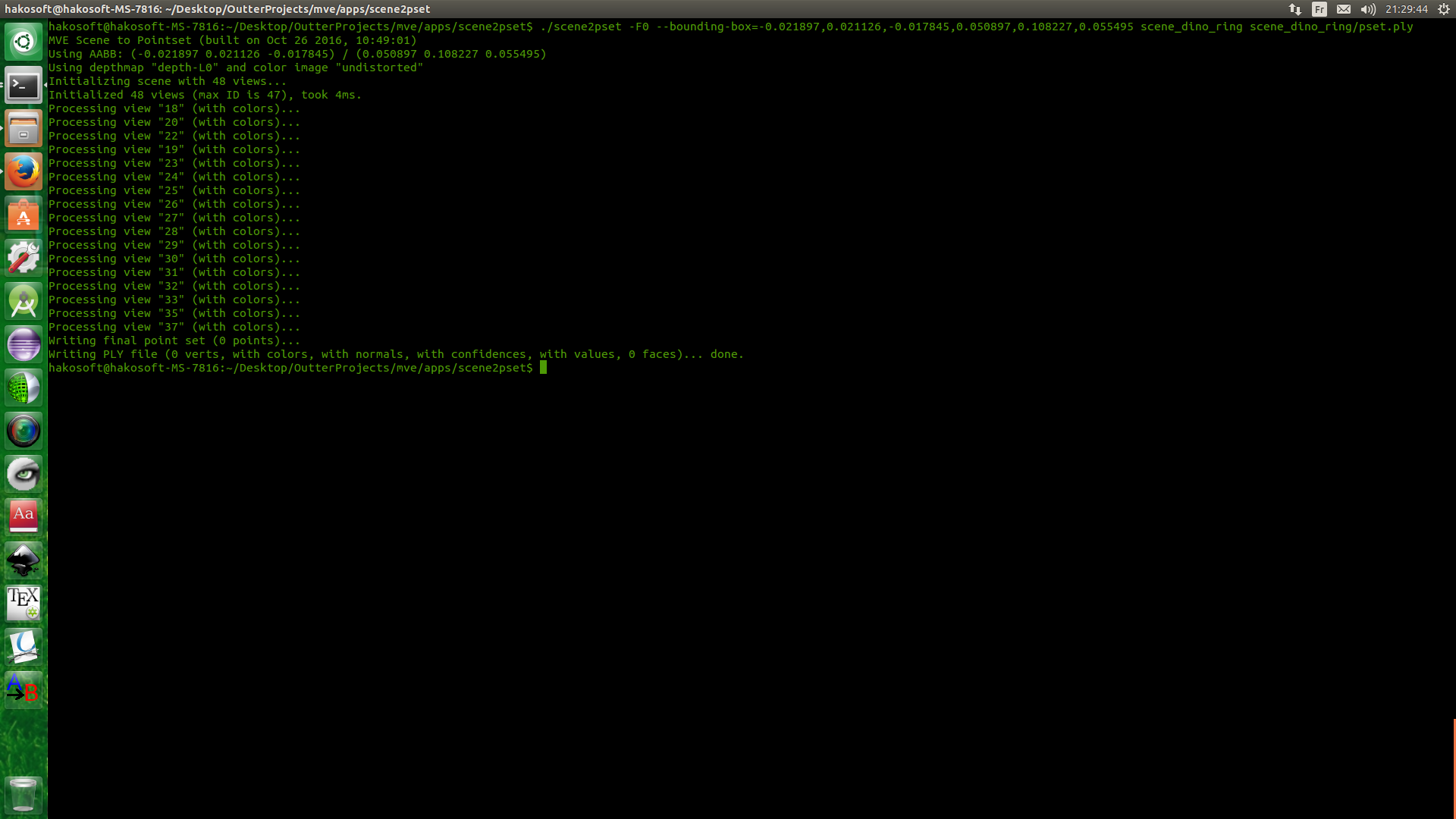
これは、すべてのポイントがBBにないため、シーン座標にないことを意味します
HelliceSaouli
2017年10月27日
バウンディングボックス、またはバウンディングボックスの指定方法が間違っている必要があります。 scene2psetはシーン座標系で出力されます。これは事実です。 UMVEには、適切なパラメーターを見つけるのに役立つバウンディングボックスクリエーターもあります。
simonfuhrmann
2017年10月27日
バウンディングボックスは私のものではありません。 それは実際にはビジョンからのものです。Middelburry、そして私がこれを提起する理由は、評価のために私の結果をミドルベリーに送ったのですが、彼らは私のポイントが正しい座標にないと言って、バウンディングボックスと上の画像は結果です。
また、問題358の回答によると、「すべての結果はSfMによって指定された座標系にあります。特定のシーンの座標系が必要な場合は、自分で変換する必要があります」。 ポイントはシーン座標系にありません
HelliceSaouli
2017年10月27日
MiddleburryデータセットでSfMを実行していますか? これにより、基本的に、Middleburryが期待するものとは関係のない任意のシーン座標系が作成されます。 これを適切に実行したい場合、これはあなたがしなければならないことです:
1)Middleburryデータセットで指定されているカメラの内因性と外因性を使用し、それをビューに使用します。つまり、パラメーターをmeta.iniファイルに挿入します。
2)実際にSfMを実行せずにSfM機能を作成します。 これは難しい部分です。特徴を検出、照合、三角測量してから、カメラのパラメータを変更しない最適化を実行する必要があるからです。 現在、この正確なシナリオのコードはないと思います。
3)Middleburrycorrdinateシステムにある結果のシーンでコードを実行します。
simonfuhrmann
2017年10月27日
ああ、それは奇妙で、このXDの背後にあるロジックはわかりません。 私はあなたが言ったことをしますが、ステップ2は難しいでしょう-__-
HelliceSaouli
2017年10月27日
最後の質問で、私はスリープ状態になりますx'):この2 arg=trueでsfmreconを実行した場合
- args.add_option( '0'、 "fixed-intrinsics"、false、 "カメラの組み込み関数を最適化しない");
- args.add_option( '0'、 "shared-intrinsics"、false、 "すべてのカメラ間で組み込み関数を共有");
それは機能しますか?
HelliceSaouli
2017年10月27日
いいえ。外因性も修正する必要があるためです。 また、外因性の修正は、インクリメンタルSfMアプローチの性質によってサポートされていません。
これらの手順の何がおかしいですか? ステップ1はかなり自明であるはずです。これらの「グラウンドトゥルース」カメラパラメータはSfMが生成できるものよりも優れているため、Middleburryが提供するパラメータを使用する必要があります。 MVSが機能するにはSfMポイントが必要なため、ステップ2が必要です。 SfMポイントを必要としないMVSアルゴリズムを使用している場合は、おそらくこの手順を省略できます。
simonfuhrmann
2017年10月28日
あなたが提供したすべての答えをありがとう。 本当に助かります。
奇妙なのは手順ではありません。 しかし、なぜsfmパラメーターはグラウンドトゥルースから大きく外れているのですか。 いいえ、私の作業は特別に_dmrecon_の作業に基づいているため、2番目のステップを省略できません。また、深さと法線を推定するためのシードとして機能を使用します。 これが私がたくさんの問題を投稿し、たくさんの質問をしている理由です^ __ ^
HelliceSaouli
2017年10月28日
SfM再構成には、元の実世界のオブジェクトに対する位置、方向、およびスケールという7次元のあいまいさがあります。 このあいまいさは、SfMの最初のステップで、任意の決定を行うことで解決されます。
したがって、再構築は「途方に暮れる」のではなく、このあいまいさに関してだけ異なります。
simonfuhrmann
2017年10月28日
私はあなたが望むことをする簡単なツールを追加しました。 このページをお読みください。
https://github.com/simonfuhrmann/mve/wiki/Middlebury-データセット
simonfuhrmann
2017年10月30日
どうもありがとう 、
HelliceSaouli
2017年10月31日
関連する問題
 daleydeng
·
8コメント
daleydeng
·
8コメント
 Jus80687
·
11コメント
HelliceSaouli
·
14コメント
Jus80687
·
11コメント
HelliceSaouli
·
14コメント
 MaxDidIt
·
30コメント
MaxDidIt
·
30コメント
 GustavoCamargoRL
·
13コメント
GustavoCamargoRL
·
13コメント
最も参考になるコメント
SfM再構成には、元の実世界のオブジェクトに対する位置、方向、およびスケールという7次元のあいまいさがあります。 このあいまいさは、SfMの最初のステップで、任意の決定を行うことで解決されます。
したがって、再構築は「途方に暮れる」のではなく、このあいまいさに関してだけ異なります。