Open3d: El registro global falla en mis datos
Cuando ejecuto un script de Python de registro global en mis nubes de puntos, solo obtengo un visor en blanco sin visualización de datos.
¿Cuál podría ser la razón de este fracaso? Adjunto los datos de mi nube de puntos, ¿podría alguien echar un vistazo?
Gracias por adelantado.
data.zip
 mutp
mutp
Todos 4 comentarios
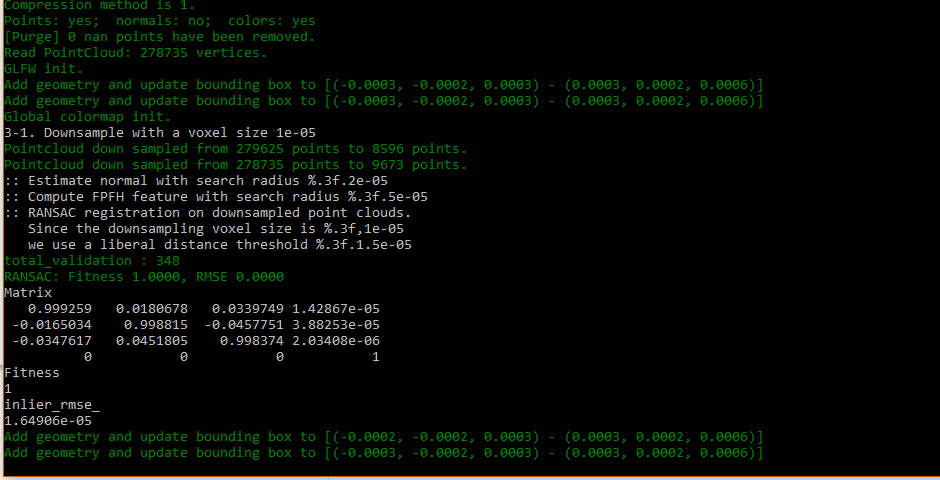
Una vez que cambié a voxel_size = 0.00001 , mis nubes de puntos pudieron registrarse globalmente. Tenía una pregunta sobre el resultado del registro global. ¿Son correctos estos valores de retorno o hay margen para mejorar más?
mutp
en 24 jul. 2018
Es porque las nubes de puntos son demasiado pequeñas. El código del tutorial está destinado al espacio que utiliza unidades métricas: 1 significa 1 m. Sin embargo, el tramo horizontal / vertical de su nube de puntos es de aproximadamente 0,00035. Si reutiliza directamente el código del tutorial, esto significa que está utilizando nubes de puntos que abarcan solo 0,035 mm.
En este caso, dado que las muestras de código del tutorial apuntan usando vóxeles de pocos centímetros, todos los puntos están dentro de un solo vóxel . Como resultado, solo quedará un punto después de reducir la resolución. Es por eso que no observó nada (en realidad, debería haber un solo punto después de reducir la resolución)
En resumen, puede probar una de las siguientes cosas:
- Intente ajustar los parámetros en el script del tutorial de acuerdo con su nube de puntos
- Cambiar la escala de las nubes de puntos.
 syncle
en 24 jul. 2018
syncle
en 24 jul. 2018
Perfecto, gracias por tu respuesta. Probaré tus sugerencias.
mutp
en 25 jul. 2018
Es porque las nubes de puntos son demasiado pequeñas. El código del tutorial está destinado al espacio que utiliza unidades métricas: 1 significa 1 m. Sin embargo, el tramo horizontal / vertical de su nube de puntos es de aproximadamente 0,00035. Si reutiliza directamente el código del tutorial, esto significa que está utilizando nubes de puntos que abarcan solo 0,035 mm.
En este caso, dado que las muestras de código del tutorial apuntan usando vóxeles de pocos centímetros, todos los puntos están dentro de un solo vóxel . Como resultado, solo quedará un punto después de reducir la resolución. Es por eso que no observó nada (en realidad, debería haber un solo punto después de reducir la resolución)
En resumen, puede probar una de las siguientes cosas:
- Intente ajustar los parámetros en el script del tutorial de acuerdo con su nube de puntos
- Cambiar la escala de las nubes de puntos.
Puede verificar que la pantalla blanca en blanco se arregle ajustando el parámetro depth_trunc en create_rgbd_image_from_color_and_depth
 ajayrfhp
en 13 nov. 2018
ajayrfhp
en 13 nov. 2018
Temas relacionados
 lordlycastle
·
3Comentarios
lordlycastle
·
3Comentarios
 marcel-bariou
·
3Comentarios
marcel-bariou
·
3Comentarios
 prerakmody
·
3Comentarios
prerakmody
·
3Comentarios
 blackccpie
·
3Comentarios
blackccpie
·
3Comentarios
 edxsx
·
3Comentarios
edxsx
·
3Comentarios
Comentario más útil
Es porque las nubes de puntos son demasiado pequeñas. El código del tutorial está destinado al espacio que utiliza unidades métricas: 1 significa 1 m. Sin embargo, el tramo horizontal / vertical de su nube de puntos es de aproximadamente 0,00035. Si reutiliza directamente el código del tutorial, esto significa que está utilizando nubes de puntos que abarcan solo 0,035 mm.
En este caso, dado que las muestras de código del tutorial apuntan usando vóxeles de pocos centímetros, todos los puntos están dentro de un solo vóxel . Como resultado, solo quedará un punto después de reducir la resolución. Es por eso que no observó nada (en realidad, debería haber un solo punto después de reducir la resolución)
En resumen, puede probar una de las siguientes cosas: