Open3d: अनुमान सामान्य फ्लैट पैच के लिए काम नहीं कर रहे हैं
ऐसा प्रतीत होता है कि EstimateNormals फ़ंक्शन पूरी तरह से फ्लैट पैच के लिए ठीक से काम नहीं करता है, वह भी किसी तरह अभिविन्यास के आधार पर।
प्रजनन करना:
import numpy as np
import open3d
X,Y = np.mgrid[0:1:0.1,0:1:0.1]
X = X.flatten()
Y = Y.flatten()
pts = np.zeros((3, X.size))
pts[0] = X
pts[1] = Y
shape = open3d.PointCloud()
shape.points = open3d.Vector3dVector(pts.T)
shape.paint_uniform_color([0, 0.651, 0.929]) # blue
open3d.estimate_normals(shape, open3d.KDTreeSearchParamHybrid(radius = 0.5, max_nn = 30))
# show the shape
open3d.draw_geometries([shape])
अगर आप लिखते हैं
pts[1] = X
pts[2] = Y
इसके बजाय - यह अपेक्षा के अनुरूप काम करता है; यदि आप 0 और 1 या 0 और 2 को सूचकांक के रूप में उपयोग करते हैं - यह अब काम नहीं करता है।
अपेक्षित होना: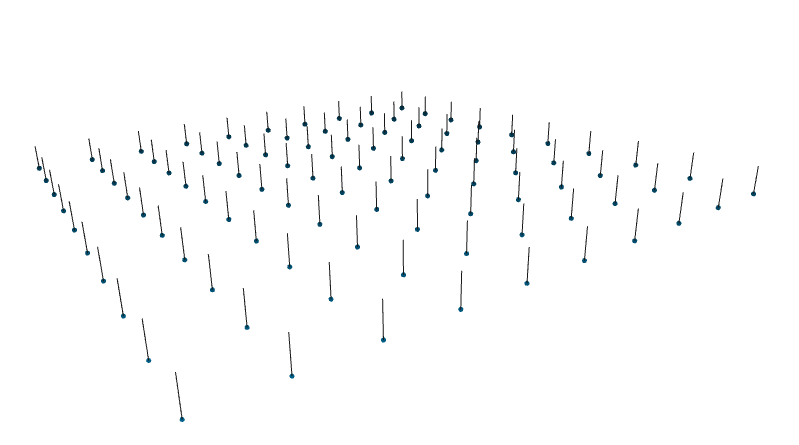
मिल गया: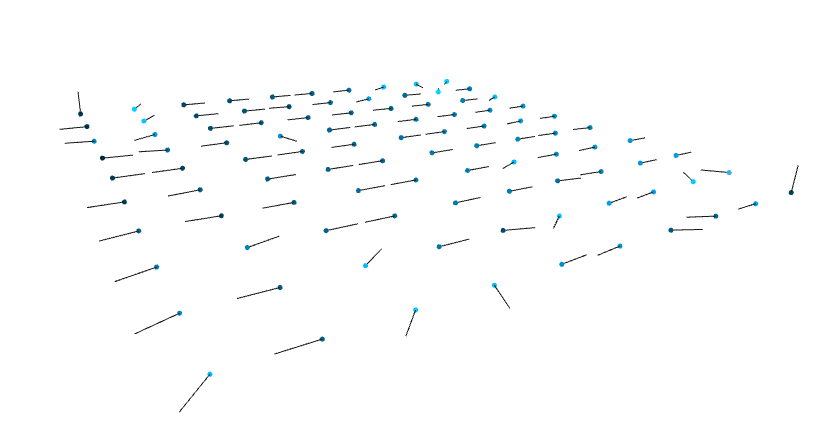
पर्यावरण (कृपया निम्नलिखित जानकारी को पूरा करें):
- ओएस: उबंटू 18.04
- पायथन संस्करण: 3.6.7
- Open3D संस्करण: 0.5 रिलीज़ (प्रतिबद्ध 6f493ef149f1360796709127312e1ff692bcf316 पर भी परीक्षण किया गया)
- क्या यह रिमोट वर्कस्टेशन है ?: नहीं
- आपने Open3D कैसे स्थापित किया?: रिलीज के लिए पिप; अपने आप को नया संस्करण बनाएं
possible bug
 mike239x
mike239x
सभी 3 टिप्पणियाँ
अच्छी कैच। इस फ़ंक्शन के संख्यात्मक मुद्दे की तरह दिखता है:
https://github.com/IntelVCL/Open3D/blob/377fc7d6a47ea47681c25a1e07a5383d62a612aa/src/Open3D/Geometry/EstimateNormals.cpp#L40
समय मिलने पर मैं इसमें खुदाई करूंगा।
 qianyizh
27 मार्च 2019
qianyizh
27 मार्च 2019
👍1
मजेदार तथ्य: बिंदुओं पर न्यूनतम शोर जोड़ने से समस्या ठीक हो जाती है।
mike239x
27 मार्च 2019
#1011 . में फिक्स्ड
 griegler
13 जून 2019
griegler
13 जून 2019
❤1
क्या यह पृष्ठ उपयोगी था?
0 / 5 - 0 रेटिंग्स
संबंधित मुद्दों
 lordlycastle
·
3टिप्पणियाँ
lordlycastle
·
3टिप्पणियाँ
 Prakash19921206
·
4टिप्पणियाँ
Prakash19921206
·
4टिप्पणियाँ
 tonghia
·
3टिप्पणियाँ
tonghia
·
3टिप्पणियाँ
 taochenshh
·
3टिप्पणियाँ
taochenshh
·
3टिप्पणियाँ
 samarth-robo
·
3टिप्पणियाँ
samarth-robo
·
3टिप्पणियाँ