Open3d: EstimasiNormals tidak berfungsi untuk tambalan datar
Tampaknya fungsi EstimateNormals tidak berfungsi dengan baik untuk patch yang benar-benar datar, juga tergantung pada orientasinya.
Untuk mereproduksi:
import numpy as np
import open3d
X,Y = np.mgrid[0:1:0.1,0:1:0.1]
X = X.flatten()
Y = Y.flatten()
pts = np.zeros((3, X.size))
pts[0] = X
pts[1] = Y
shape = open3d.PointCloud()
shape.points = open3d.Vector3dVector(pts.T)
shape.paint_uniform_color([0, 0.651, 0.929]) # blue
open3d.estimate_normals(shape, open3d.KDTreeSearchParamHybrid(radius = 0.5, max_nn = 30))
# show the shape
open3d.draw_geometries([shape])
Jika Anda menulis
pts[1] = X
pts[2] = Y
sebagai gantinya - ini berfungsi seperti yang diharapkan; jika Anda menggunakan 0 dan 1 atau 0 dan 2 sebagai indeks - ini tidak lagi berfungsi.
Diharapkan: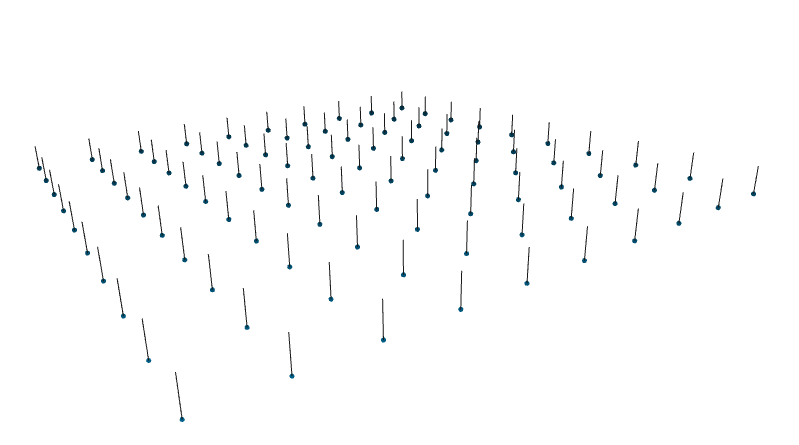
Punya: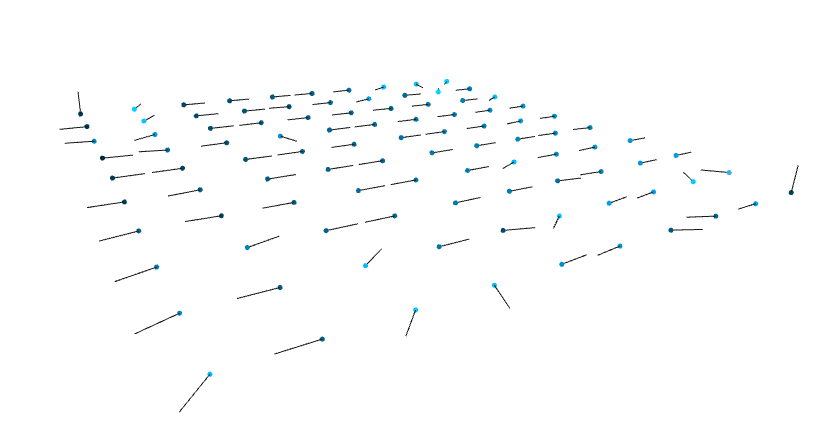
Lingkungan (harap lengkapi informasi berikut):
- OS: Ubuntu 18.04
- Versi Python: 3.6.7
- Versi Open3D: rilis 0,5 (juga diuji pada komit 6f493ef149f1360796709127312e1ff692bcf316)
- Apakah ini stasiun kerja jarak jauh?: tidak
- Bagaimana Anda menginstal Open3D ?: pip untuk rilis; buat sendiri versi yang lebih baru
possible bug
 mike239x
mike239x
Semua 3 komentar
Tangkapan yang bagus. Sepertinya masalah numerik dari fungsi ini:
https://github.com/IntelVCL/Open3D/blob/377fc7d6a47ea47681c25a1e07a5383d62a612aa/src/Open3D/Geometry/EstimateNormals.cpp#L40
Saya akan menggalinya ketika saya punya waktu.
 qianyizh
pada 27 Mar 2019
qianyizh
pada 27 Mar 2019
👍1
Fakta menyenangkan: menambahkan sedikit noise pada poin akan memperbaiki masalah.
mike239x
pada 27 Mar 2019
Diperbaiki di # 1011
 griegler
pada 13 Jun 2019
griegler
pada 13 Jun 2019
❤1
Apakah halaman ini membantu?
0 / 5 - 0 peringkat
Masalah terkait
 nrj127
·
4Komentar
nrj127
·
4Komentar
 blackccpie
·
3Komentar
blackccpie
·
3Komentar
 taochenshh
·
3Komentar
taochenshh
·
3Komentar
 prerakmody
·
3Komentar
prerakmody
·
3Komentar
 marcel-bariou
·
3Komentar
marcel-bariou
·
3Komentar