Open3d: EstimateNormals не работает для плоских участков
Похоже, что функция EstimateNormals не работает должным образом для полностью плоских участков, также как-то в зависимости от ориентации.
Воспроизвести:
import numpy as np
import open3d
X,Y = np.mgrid[0:1:0.1,0:1:0.1]
X = X.flatten()
Y = Y.flatten()
pts = np.zeros((3, X.size))
pts[0] = X
pts[1] = Y
shape = open3d.PointCloud()
shape.points = open3d.Vector3dVector(pts.T)
shape.paint_uniform_color([0, 0.651, 0.929]) # blue
open3d.estimate_normals(shape, open3d.KDTreeSearchParamHybrid(radius = 0.5, max_nn = 30))
# show the shape
open3d.draw_geometries([shape])
Если вы напишете
pts[1] = X
pts[2] = Y
вместо этого - работает как положено; если вы используете в качестве индексов 0 и 1 или 0 и 2 - это больше не работает.
Ожидал: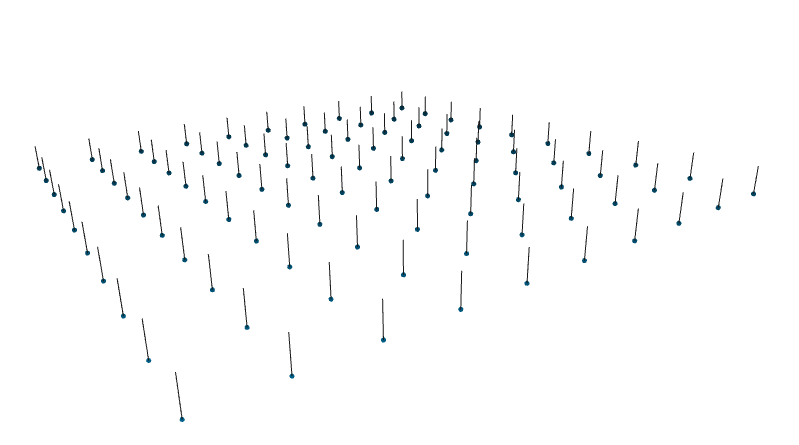
Получил: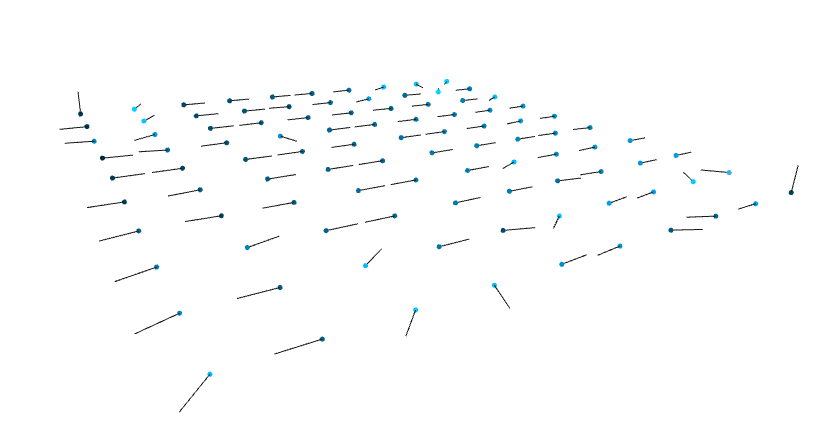
Окружающая среда (просьба заполнить следующую информацию):
- ОС: Ubuntu 18.04
- Версия Python: 3.6.7
- Версия Open3D: выпуск 0.5 (также проверено на коммите 6f493ef149f1360796709127312e1ff692bcf316)
- Это удаленная рабочая станция ?: нет
- Как вы установили Open3D ?: pip для выпуска; построить себе более новую версию
possible bug
 mike239x
mike239x
Все 3 Комментарий
Хороший улов. Похоже на числовую проблему этой функции:
https://github.com/IntelVCL/Open3D/blob/377fc7d6a47ea47681c25a1e07a5383d62a612aa/src/Open3D/Geometry/EstimateNormals.cpp#L40
Я раскопаюсь, когда у меня будет время.
 qianyizh
27 мар. 2019
qianyizh
27 мар. 2019
👍1
Интересный факт: добавление минимального шума к точкам решает проблему.
mike239x
27 мар. 2019
Исправлено в # 1011
 griegler
13 июн. 2019
griegler
13 июн. 2019
❤1
Была ли эта страница полезной?
0 / 5 - 0 рейтинги
Смежные вопросы
 DKandrew
·
3Комментарии
mike239x
·
4Комментарии
DKandrew
·
3Комментарии
mike239x
·
4Комментарии
 Prakash19921206
·
4Комментарии
Prakash19921206
·
4Комментарии
 blackccpie
·
3Комментарии
blackccpie
·
3Комментарии
 samarth-robo
·
3Комментарии
samarth-robo
·
3Комментарии