Tcopen: example Sequencer logic as you know the missing conditions to move on to the next step?
Hello:
In the example of the Sequencer logic as it is known what are the missing conditions to advance to the next step?
Thanks you, Víctor.
 runtimevic
runtimevic
All 8 comments
Not sure which example exactly, in which folder? Messaging could not be implemented by the component in the example you are looking at.
 PTKu
on 4 May 2021
PTKu
on 4 May 2021
Not sure which example exactly, in which folder? Messaging could not be implemented by the component in the example you are looking at.
https://www.youtube.com/watch?v=yCUv2LW-6zo
example logic sequencer
runtimevic
on 4 May 2021
Ahhaa... there are some debug messages, but not full diagnostics implemented in the components, that is something we need to implement. So for instance, if you go to a pneumatic cylinder you can add timer to time operation time-out and add
IF timer.Q THEN Messenger.Error('I did not reach the extremity sensor'); END_IF;
In order to detect physical input (sensor, as you may have seen in other inxton videos), we need to conclude decisions in discussion #15.
PTKu
on 4 May 2021
Ahhaa... there are some debug messages, but not full diagnostics implemented in the components, that is something we need to implement. So for instance, if you go to a pneumatic cylinder you can add timer to time operation time-out and add
IF timer.Q THEN Messenger.Error('I did not reach the extremity sensor'); END_IF;In order to detect physical input (sensor, as you may have seen in other inxton videos), we need to conclude decisions in discussion #15.
I think the most successful thing is that the component itself has its own error diagnosis.
runtimevic
on 4 May 2021
Im very interested in this things and i love this approach to broaden the knowledge about automation,
because all i do is selftaught, and it is a hell of a mountain to climb.
Everytime i read something like that, i'm getting aware, how much i don't know and cannot even grasp the problems.
Nevertheless i try to contribute:
I've mage my own cylinder fb with diagnosis and i will describe it.

The In- and Outputs %Q/%I are declared in the dut, the linking to hardware in
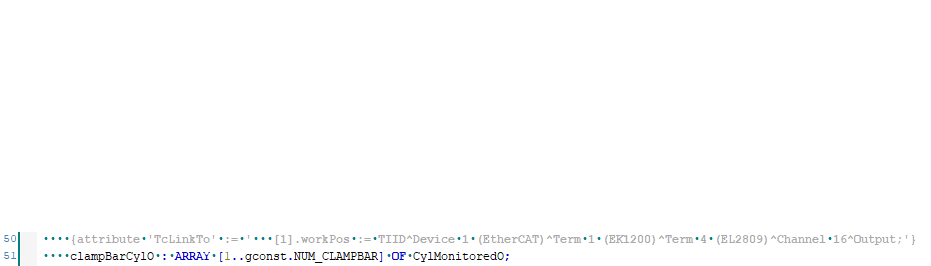
just for reference to https://github.com/TcOpenGroup/TcOpen/discussions/15.
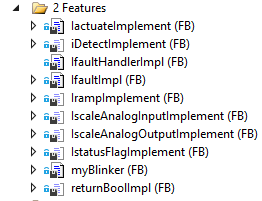
I have various so called features, which are small fbs. They implement simple task and later can be assembled as components for example as Cylinder or Motor.
My FB Cyl is derived from abstract class Actuator. WIth an Interface IactionProviding i have Methods for fault- handling and the possibility to set pEventid, pSeverity etc.
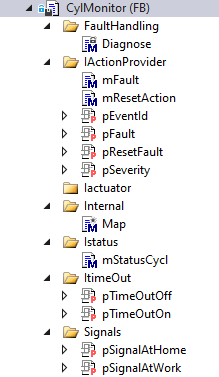
Now when instantiating the cylinder, i have the possibility to add timeOuts to WorkPos and/or HomePos.
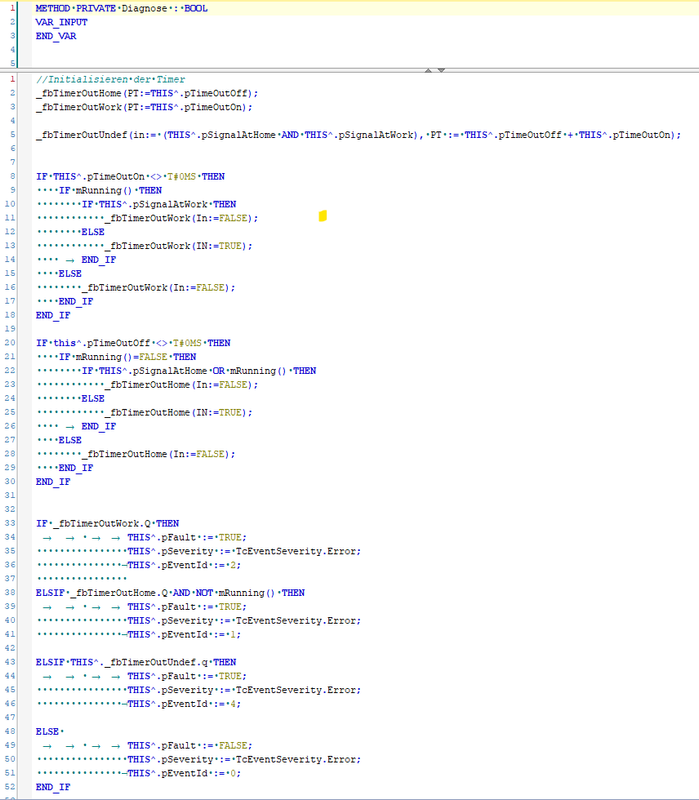
If the time is set and a timeout occurs, via TCEventHandling System there gets an Event created.
This is the Diagnose Method
If this is interesting or useful, i'd appreciate any feedback.
 RGrabichler
on 7 May 2021
RGrabichler
on 7 May 2021
Thanks for sharing @RGrabichler! I like your design, it looks very neat. Would you consider the implementation of event logger into TcOpen messaging?
Have a brief look at the following links, we can discuss it in more detail next week.
Please ignore that it looks like C# documentation we will polish it in the feature, for now just look at member documentation.
Thanks
PTKu
on 8 May 2021
I'd love to contribute to such a project.
As mentioned before, i have hardly any experience, working in a bigger project with other people,
so i'd need a lot of guidance early on.
RGrabichler
on 10 May 2021
@RGrabichler I'ts OK... I think we are all going to learn along the way. There is a little tradition in industrial automation to use GH. We will need to prepare some instructions for the people to get started. I hope we can come with some video this or the next week.
PTKu
on 10 May 2021
Related issues
PTKu
·
31Comments
runtimevic
·
12Comments
 songjinxi
·
3Comments
songjinxi
·
3Comments
 ominouse
·
3Comments
ominouse
·
3Comments
 DmitryEfimenko
·
3Comments
DmitryEfimenko
·
3Comments
Most helpful comment
Thanks for sharing @RGrabichler! I like your design, it looks very neat. Would you consider the implementation of event logger into TcOpen messaging?
Have a brief look at the following links, we can discuss it in more detail next week.
conceptual
object
messenger,
Please ignore that it looks like C# documentation we will polish it in the feature, for now just look at member documentation.
code
Thanks