Halo
apakah ada cara mudah membangun di MVE untuk mengubah titik cloud dari scene2pset ke sistem koordinat adegan.
Saya sedang mengembangkan algoritme rekonstruksi peta kedalaman dan memasukkan peta ini ke MVE untuk membuat titik cloud, saya menggunakan dataset dino untuk menguji rekonstruksi baik-baik saja tetapi tidak dalam koordinat adegan. Jika saya menggunakan bounding Box arg dengan scene2pset saya mendapatkan file ply kosong. jika tidak, saya mendapatkan poin saya yang berarti cloud saya tidak dalam koordinat adegan bagaimana cara memperbaikinya
catatan: bahkan jika saya menggunakan dmrecon hal yang sama terjadi
Terima kasih
 HelliceSaouli
HelliceSaouli
Semua 12 komentar
Aplikasi scene2pset mengekspor titik awan dalam sistem koordinat adegan. Tidak ada transformasi yang diterapkan. Anda dapat memeriksa dengan memuat cloud titik dan pemandangan di UMVE di tab "Pemeriksaan Pemandangan".
 simonfuhrmann
pada 27 Okt 2017
simonfuhrmann
pada 27 Okt 2017
Tidak, saya tidak berpikir begitu. Saya tidak memiliki UMVE build in sekarang, saya akan memeriksanya nanti. tapi ini adalah keluaran scene2pset.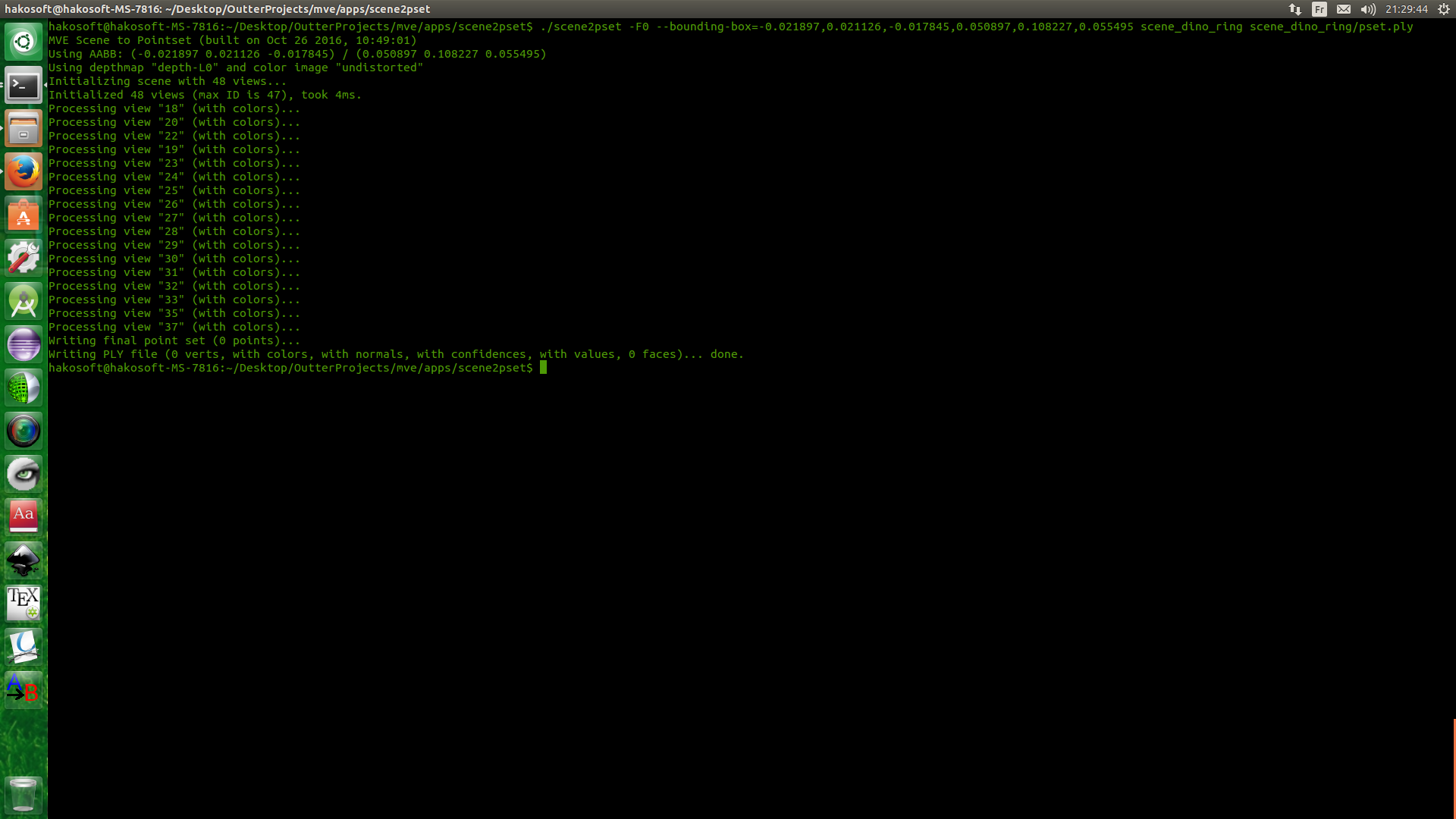
ini berarti semua titik tidak berada di BB sehingga tidak berada dalam koordinat adegan
HelliceSaouli
pada 27 Okt 2017
Kotak pembatas Anda, atau cara Anda menentukan kotak pembatas, pasti salah. scene2pset output dalam sistem koordinat adegan, itu fakta. UMVE juga memiliki pembuat kotak pembatas yang dapat membantu Anda menemukan parameter yang tepat.
simonfuhrmann
pada 27 Okt 2017
Kotak pembatas itu bukan milikku. itu sebenarnya dari visi.Middelburry, dan alasan saya mengangkat ini adalah karena saya mengirim hasil saya untuk evaluasi ke Middlebury dan mereka mengatakan poin saya tidak dalam koordinat yang benar dan mereka meminta saya untuk menjalankan pemeriksaan kewarasan menggunakan kotak pembatas mereka dan gambar di atas adalah hasilnya.
Juga sesuai dengan jawaban Anda untuk masalah 358 : " Semua hasil berada dalam sistem koordinat yang ditentukan oleh SfM. Jika Anda menginginkan sistem koordinat adegan tertentu, Anda harus mengubahnya sendiri". titik-titik tidak dalam sistem koordinat adegan
HelliceSaouli
pada 27 Okt 2017
Apakah Anda menjalankan SfM pada dataset Middleburry? Ini pada dasarnya akan membuat sistem koordinat pemandangan sewenang-wenang yang tidak ada hubungannya dengan yang diharapkan Middleburry. Jika Anda ingin melakukannya dengan benar, inilah yang harus Anda lakukan:
1) Gunakan intrinsik dan ekstrinsik kamera sebagaimana ditentukan dalam dataset Middleburry, dan gunakan itu untuk tampilan, yaitu, masukkan parameter ke dalam file meta.ini .
2) Buat fitur SfM tanpa benar-benar menjalankan SfM. Itulah bagian yang sulit, karena Anda ingin mendeteksi, mencocokkan, melakukan triangulasi fitur, lalu menjalankan pengoptimalan yang tidak mengubah parameter kamera. Saya tidak berpikir kami memiliki kode untuk skenario yang tepat ini sekarang.
3) Jalankan kode Anda pada adegan yang dihasilkan, yang ada di sistem koordinat Middleburry.
simonfuhrmann
pada 27 Okt 2017
oh ok, aneh dan saya tidak melihat logika di balik ini XD. Saya akan melakukan apa yang Anda katakan, tetapi langkah 2 akan sulit -__-
HelliceSaouli
pada 27 Okt 2017
pertanyaan terakhir dan saya akan tidur x') : jika saya menjalankan sfmrecon dengan 2 arg = true ini
- args.add_option('0', "fixed-intrinsics", false, "Jangan optimalkan kamera intrinsik");
- args.add_option('0', "shared-intrinsics", false, "Share intrinsik antara semua kamera");
apakah itu akan berhasil?
HelliceSaouli
pada 27 Okt 2017
Tidak. Karena Anda juga harus memperbaiki ekstrinsiknya. Dan memperbaiki ekstrinsik tidak didukung oleh sifat pendekatan SfM inkremental.
Apa yang aneh dari langkah-langkah ini? Langkah 1 harus cukup jelas, Anda harus menggunakan parameter yang disediakan Middleburry karena parameter kamera "kebenaran dasar" ini lebih baik daripada yang dapat dihasilkan oleh SfM mana pun. Langkah 2 diperlukan karena MVS kami membutuhkan poin SfM untuk berfungsi. Jika Anda memiliki algoritme MVS yang tidak memerlukan poin SfM, Anda mungkin dapat mengabaikan langkah ini.
simonfuhrmann
pada 28 Okt 2017
Terima kasih atas semua jawaban yang Anda berikan. itu sangat membantu.
Bukan langkahnya yang aneh. tetapi mengapa parameter sfm jauh dari kebenaran dasar. dan tidak, saya tidak dapat menghilangkan langkah ke-2 karena pekerjaan saya didasarkan pada pekerjaan Anda khususnya _dmrecon_ , saya juga menggunakan fitur sebagai benih untuk memperkirakan kedalaman dan normal. Inilah mengapa saya memposting banyak masalah dan mengajukan banyak pertanyaan ^__^
HelliceSaouli
pada 28 Okt 2017
Rekonstruksi SfM memiliki ambiguitas 7 dimensi, yaitu posisi, orientasi dan skala terhadap objek dunia nyata yang asli. Ambiguitas ini diselesaikan pada langkah SfM pertama dengan membuat beberapa keputusan sewenang-wenang.
Jadi rekonstruksi tidak "jauh", hanya berbeda sehubungan dengan ambiguitas ini.
simonfuhrmann
pada 28 Okt 2017
Saya menambahkan alat sederhana yang melakukan apa yang Anda inginkan. Silakan baca halaman ini.
https://github.com/simonfuhrmann/mve/wiki/Middlebury-Datasets
simonfuhrmann
pada 30 Okt 2017
Terima kasih banyak ,
HelliceSaouli
pada 31 Okt 2017
Masalah terkait
 GustavoCamargoRL
·
13Komentar
GustavoCamargoRL
·
13Komentar
 MaxDidIt
·
30Komentar
HelliceSaouli
·
14Komentar
MaxDidIt
·
30Komentar
HelliceSaouli
·
14Komentar
 Jus80687
·
11Komentar
Jus80687
·
11Komentar
 daleydeng
·
8Komentar
daleydeng
·
8Komentar
Komentar yang paling membantu
Rekonstruksi SfM memiliki ambiguitas 7 dimensi, yaitu posisi, orientasi dan skala terhadap objek dunia nyata yang asli. Ambiguitas ini diselesaikan pada langkah SfM pertama dengan membuat beberapa keputusan sewenang-wenang.
Jadi rekonstruksi tidak "jauh", hanya berbeda sehubungan dengan ambiguitas ini.